




Txoj cai ua haujlwm thiab kev faib tawm ntawm cov kabmob sib nqus
Kev sib nqus hlau nplaumCov kab ke tuaj yeem muab faib ua peb pawg raws li lawv cov hauv paus ntsiab lus ua haujlwm: Active Magnetic Bearing, Passive Magnetic Bearing, thiab Hybrid Magnetic Bearing.
Cov kabmob sib nqus nquag
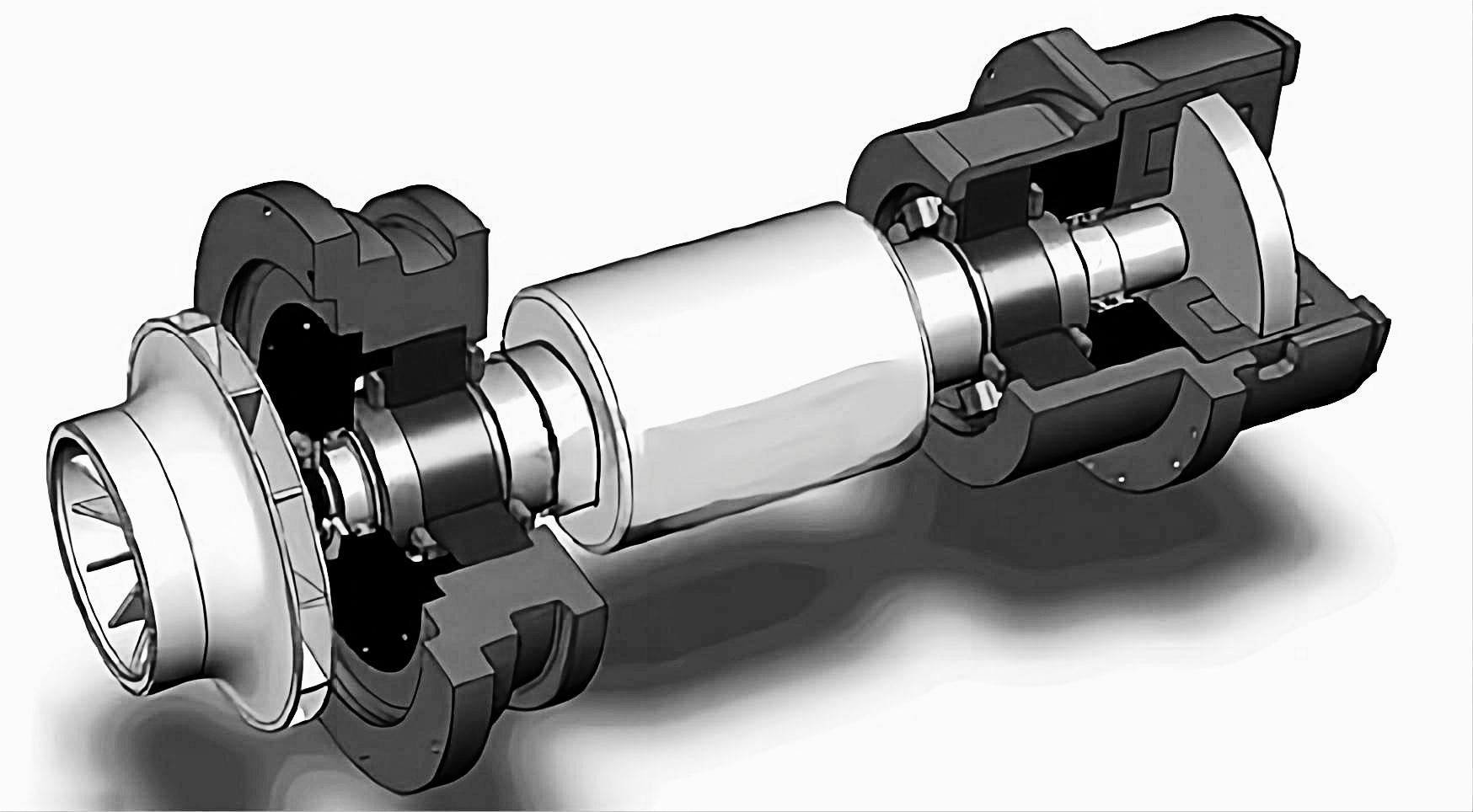
Cov kabmob sib nqus nquag siv lub zog hluav taws xob tswj tau los ua kom lub ncej tig, uas feem ntau yog tsim los ntawm rotors, solenoids, sensors, controllers, thiab lub zog amplifiers. Cov solenoids tau teeb tsa rau ntawm lub stator uas tau dai rau hauv lub teb sib nqus uas tsim los ntawm cov electromagnets tso rau hauv radial symmetry, txhua tus ntawm lawv muaj ib lossis ntau lub sensors los saib xyuas kev hloov pauv ntawm txoj haujlwm ntawm lub ncej tas li. Lub teeb liab tso tawm los ntawm lub sensor, nrog kev pab los ntawm lub kaw lus tswj hwm hluav taws xob, kho qhov tam sim no los ntawm lub electromagnet, kom tswj tau qhov kev nyiam ntawm lub electromagnet, kom lub ncej tig khiav hauv lub xeev ruaj khov thiab sib npaug, thiab ua tiav qee qhov kev cai raug.
Cov kabmob sib nqus nquag tuaj yeem muab faib ua kev tswj tam sim no thiab kev tswj hluav taws xob raws li ntau txoj kev tswj hwm, thiab tuaj yeem muab faib ua cov kabmob sib nqus radial thiab cov kabmob sib nqus axial raws li ntau txoj kev txhawb nqa. Tam sim no, ntawm cov kabmob sib nqus nquag, qhov siv dav tshaj plaws yog DC tswj cov kabmob sib nqus.
Feem ntau, cov khoom siv kho tshuab ntawm cov kabmob sib nqus nquag yog tsim los ntawm cov kabmob radial thiab cov kabmob axial, thiab cov kabmob radial yog tsim los ntawm stator (electromagnet) thiab rotor; Axial bearings muaj cov stator (electromagnet) thiab lub phaj thrust.
Vim tias cov khoom siv sib nqus muaj qhov zoo ntawm qhov chaw rotor, qhov tawv ntawm cov khoom siv thiab kev co tuaj yeem txiav txim siab los ntawm lub kaw lus tswj hwm, nws tau siv dav tshaj plaws hauv kev sib nqus levitation, thiab kev tshawb fawb ntawm cov khoom siv sib nqus tau ib txwm yog qhov tseem ceeb ntawm kev tshawb fawb txog kev siv tshuab sib nqus levitation. Tom qab ntau xyoo ntawm kev ua haujlwm hnyav, nws txoj kev tsim qauv thiab cov txheej txheem tau dhau los ua ntau dua thiab paub tab.
Kev sib nqus passive
Ua ib hom kev sib nqus bearing, passive magnetic bearing muaj nws tus kheej qhov zoo tshwj xeeb, nws me me, tsis siv hluav taws xob, thiab yooj yim hauv cov qauv. Qhov sib txawv loj tshaj plaws ntawm passive magnetic bearings thiab active magnetic bearings yog tias tus qub tsis muaj lub tshuab tswj hwm hluav taws xob, tab sis siv cov yam ntxwv ntawm lub zog sib nqus nws tus kheej los ua kom lub qhov tig. Tam sim no, cov passive magnetic bearings feem ntau siv yog cov hlau nplaum tas mus li uas muaj cov hlau nplaum tas mus li. Cov hlau nplaum tas mus li tuaj yeem muab faib ua ob hom: hom repulsion thiab hom suction.
Cov hlau nplaum tas mus li passive tuaj yeem siv ua ob qho tib si radial bearings thiab thrust bearings (axial bearings), ob qho tib si tuaj yeem nqus lossis repulsion. Nyob ntawm qhov kev taw qhia magnetization thiab qhov chaw sib piv ntawm lub nplhaib magnetic, cov hlau nplaum tas mus li bearings muaj ntau yam qauv sib nqus circuit. Tab sis muaj ob qho qauv yooj yim.
Lwm hom kev sib nqus passive yog raws li lub zog nqus, uas ua haujlwm ntawm cov khoom sib nqus mos mos. Thaum lub rotor Cheebtsam txav mus rau radial, qhov cuam tshuam nqus los ntawm kev hloov pauv ntawm magnetoresistance, yog li nws tseem hu ua "magnetoresistive bearing". Hom kev sib nqus no tuaj yeem tsim kom qhov chaw sib nqus tas mus li tsis tig, thiab tsuas yog qhov chaw hlau mos mos tig, kom lub kaw lus muaj kev ruaj khov zoo dua.
Kev sib xyaw ua ke ntawm cov teebmeem ruaj khov ntawm cov bearings tsis kam thiab cov solenoids nquag ua rau muaj lub kaw lus sib nqus nrog kev siv hluav taws xob tsawg.
Cov kabmob sib nqus sib xyaw
Cov kabmob sib nqus sib xyaw ua ke yog tsim los ntawm cov kabmob sib nqus nquag, cov kabmob sib nqus tsis siv neeg thiab qee lwm yam kev txhawb nqa thiab kev ruaj khov - ib hom kev sib xyaw ua ke ntawm cov kabmob sib nqus. Nws coj mus rau hauv tus account cov yam ntxwv ntawm cov kabmob sib nqus nquag thiab cov kabmob sib nqus tsis siv neeg.
Lub hybrid magnetic bearing yog siv lub magnetic field uas tsim los ntawm lub magnet tas mus li los hloov lub static bias magnetic field ntawm lub electromagnet, uas tsis tsuas yog txo qhov kev siv hluav taws xob ntawm lub zog amplifier, tab sis kuj txo cov lej ntawm ampere tig ntawm lub electromagnet los ntawm ib nrab, txo qhov ntim ntawm lub magnetic bearing, thiab txhim kho lub peev xwm thauj khoom.
Vim tias lub teb sib nqus bias yog tsim los ntawm lub hlau nplaum tas mus li thiab lub teb sib nqus tswj tau yog tsim los ntawm lub tshuab hluav taws xob, cov hlau nplaum tas mus li offset hybrid magnetic bearings muaj cov txiaj ntsig zoo li nram no:
1) Lub hlau nplaum tas mus li yog siv los muab lub zog sib nqus bias static, thiab lub electromagnet tsuas yog muab lub zog tswj magnetic rau kev sib npaug ntawm lub nra lossis kev cuam tshuam sab nraud, uas tuaj yeem zam kev poob hluav taws xob los ntawm qhov tam sim no bias ntawm lub kaw lus thiab txo qhov cua sov ntawm lub kauj.
2) Tus naj npawb ntawm kev tig uas xav tau rau lub electromagnet ntawm lub hybrid magnetic bearing yog me dua li ntawm lub active magnetic bearing, uas yog qhov zoo rau kev txo qhov ntim ntawm lub magnetic bearing thiab txuag cov ntaub ntawv. Hom bearing no muaj qhov zoo ntawm qhov me me, lub teeb yuag thiab kev ua haujlwm siab, thiab yog qhov tsim nyog rau miniaturization thiab me me daim ntawv thov.
Lub sijhawm tshaj tawm: Lub Ob Hlis-19-2025



